近年,imageing plethysmography(iPPG) とカメラを用
いた生体信号の検出が,比較的容易で柔軟な非接触計測手
法として注目されている.このような iPPG とカメラの組
み合わせは,自動運転車,新生児モニタリングや遠隔医療
等多様のアプリケーションに統合可能であり実用化が進め
られているものの,カメラや検出対象がそれぞれ自由に可
動するため,安定した計測が困難という問題がある.そこ
で2次元特徴を追跡することでこの問題を解消する研究が
行われているが,ダイナミックな動きの際に不安定となる.
本論文では,3 次元の顔形状を追跡に用いることで,動き
に頑健な手法の構築を目指す.
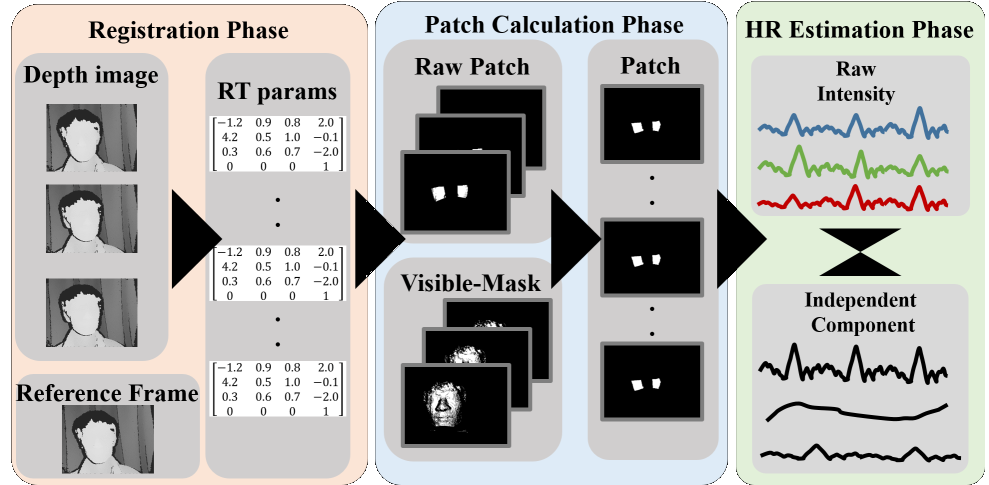 アルゴリズムの流れ
アルゴリズムの流れ
3次元追跡手法利用したiPPG
深度情報をから 3 次元点群情報を取得し,
より高精度な顔追跡を行うことで,動きに対する rPPG の
堅牢性を向上させる手法を提案する.
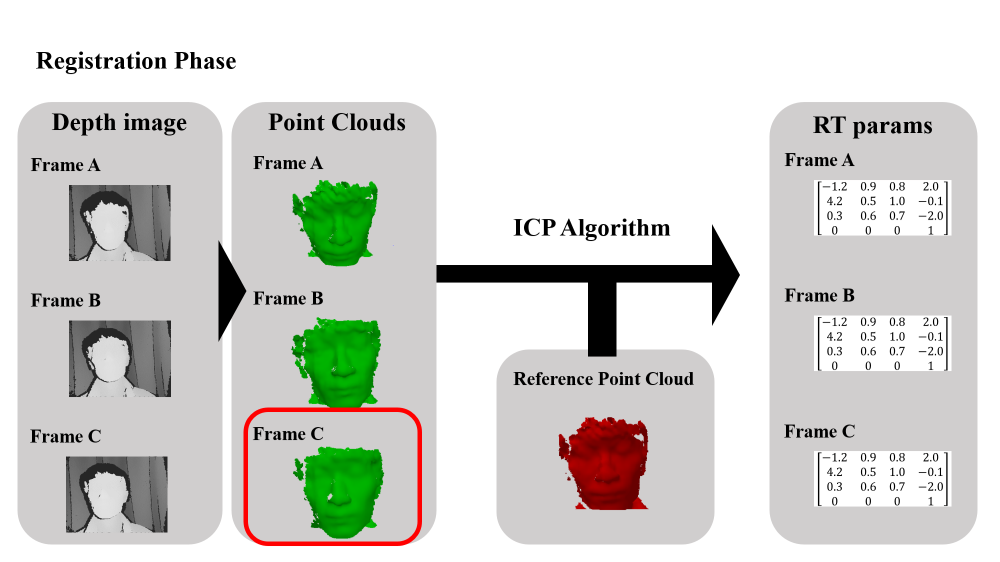
提案手法では,rPPG を RGBD 画像系列から
計算する.剛体変換パラメータは,Iterative Closest Point
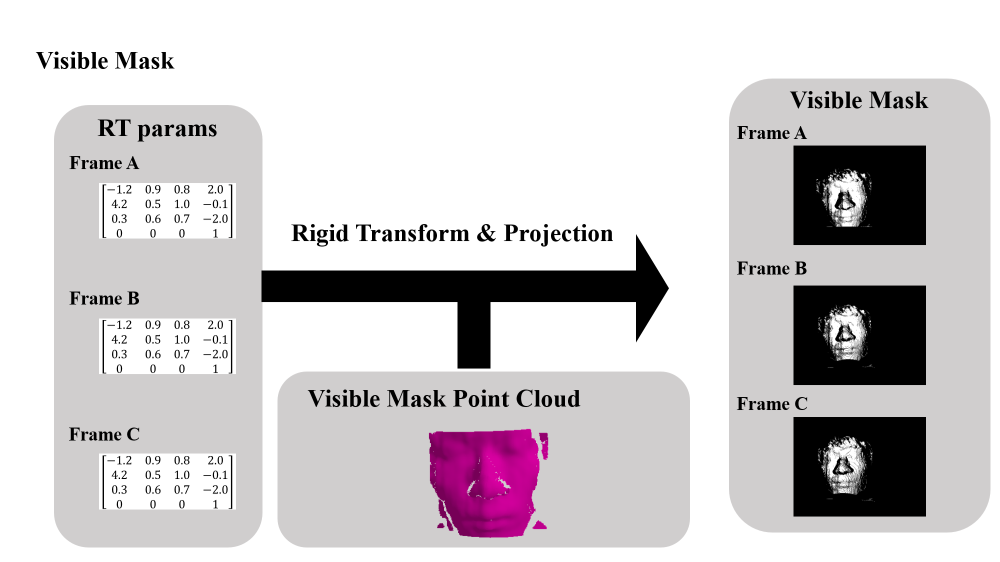
(ICP) アルゴリズムを用いて推定する.全フレームで
観測できるピクセルのマスクである Visible-Mask は,全
フレームで推定された剛体変換パラメータを使用して生成
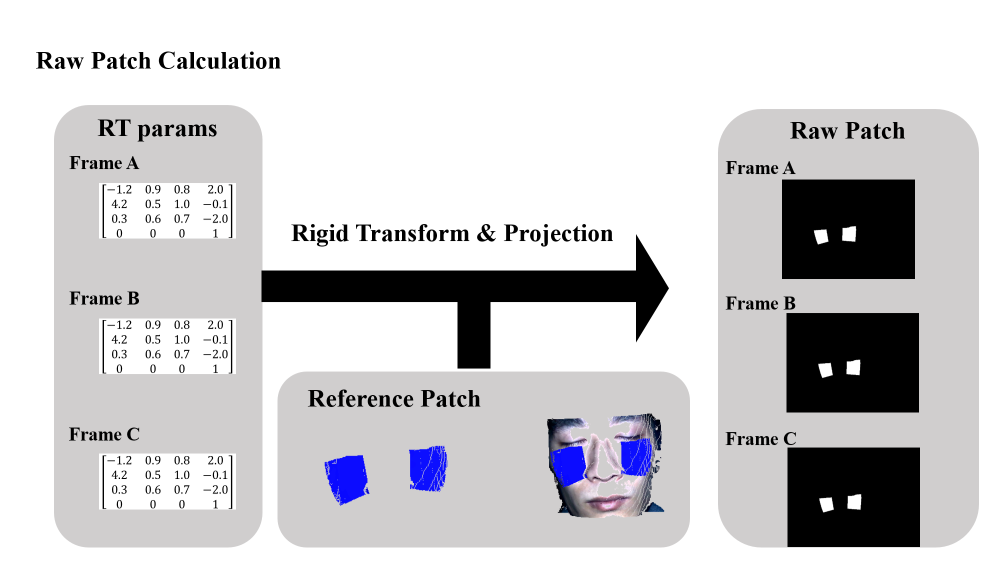
する.剛体変換パラメータを用いて変換し画像平面に投影
したパッチと Visble-Mask を利用して,輝度系列を計算す
るためのパッチマスクを作成する.画像系列内のある 1 フ
レームを参照フレームとして定義する.参照フレームの点
群データは位置合わせの際の参照点群として利用される.
参照フレームでは参照パッチマスクと参照パッチマスクの
点群データも設定されている.参照パッチの点群データを
推定された剛体変換パラメータを用いて剛体変換し,その
点群を画像平面に投影することで参照パッチマスクの追跡
を行う.
3次元点群の位置合わせ
参照フレームの点群と他のフレームの点群を位置合わせ
するために点群に ICP アルゴリズムを適用する.剛体変
換パラメータの推定には 対応点探索距離に関してマルチ
スケールな ICP アルゴリズムを用いた.マルチスケール
な ICP では,まずグローバルな範囲に関して位置合わせ
を行い,次にローカルな範囲に関して位置合わせを行う.
 位置合わせの流れ
位置合わせの流れ
オクルージョン領域の無効化
提案手法で追跡のために利用する参照パッチは固定され
ているため,被験者の動きにより参照パッチの一部が隠れ
る場合がある.このようなオクルージョンにより,輝度系
列に含まれるノイズが大きくなり心拍推定の精度が低下
する.この問題の解決のためオクルージョン領域を削除す
る必要がある.各フレームの剛体変換パラメータを推定し
た後,推定したパラメータにより参照フレームの点群を剛
体変換する.変換された参照フレームの点群内の点がカメ
ラ位置から見て,他の点群により隠れている場合,それら
の点をオクルージョンとして削除する.
観測パッチの作成
心拍数推定に用いる輝度系列の各輝度はパッチ内の平均
輝度値を用いる.このパッチを作成するために 68 個の顔
のランドマークを利用した.輝度計算に用いる顔パッチの
位置は非常に重要であり,額と両頬は rPPG 信号を抽出す
ることに適した領域であることが知られている.実験
時の全被験者は額の領域が髪の毛で隠れていたため,この
研究では頬のパッチのみを利用した.参照フレームに対し
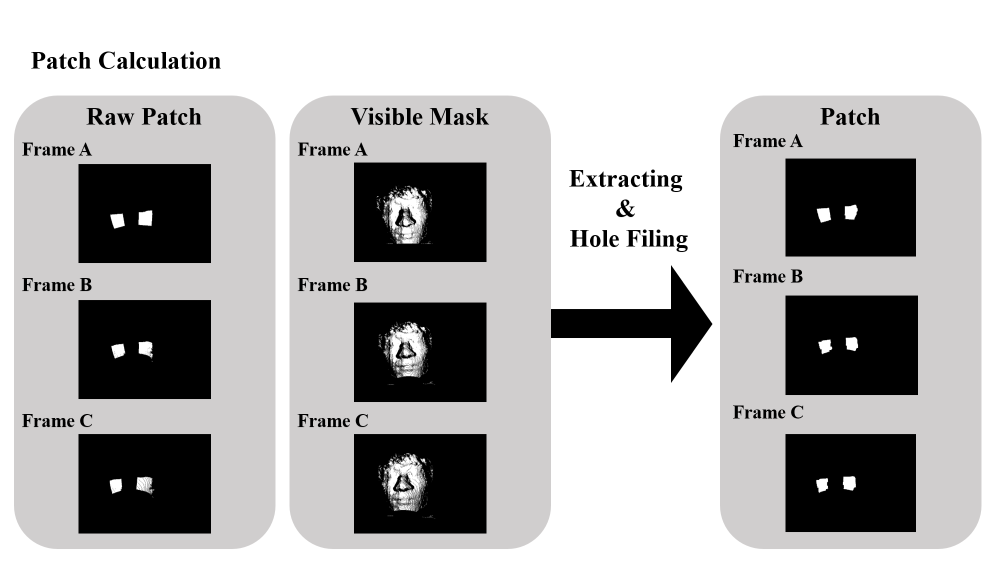
て顔のランドマークを利用して頬領域の Raw-Mask を作
成する.Raw-Mask と Visible-Mask の両方で観測された
ピクセルは観測パッチとして利用される.上記のようにし
て得られた観測パッチは穴が存在する場合があるため,モ
ルフォロジー変換を用いて穴埋め処理を行った.心拍推定
のための輝度系列作成には,このようにして得られた観測
パッチ内のピクセルの平均輝度値を用いる
提案手法の3次元追跡手法と従来の2次元追跡手法を比較した結果,
提案手法による追跡の有効性が示された.
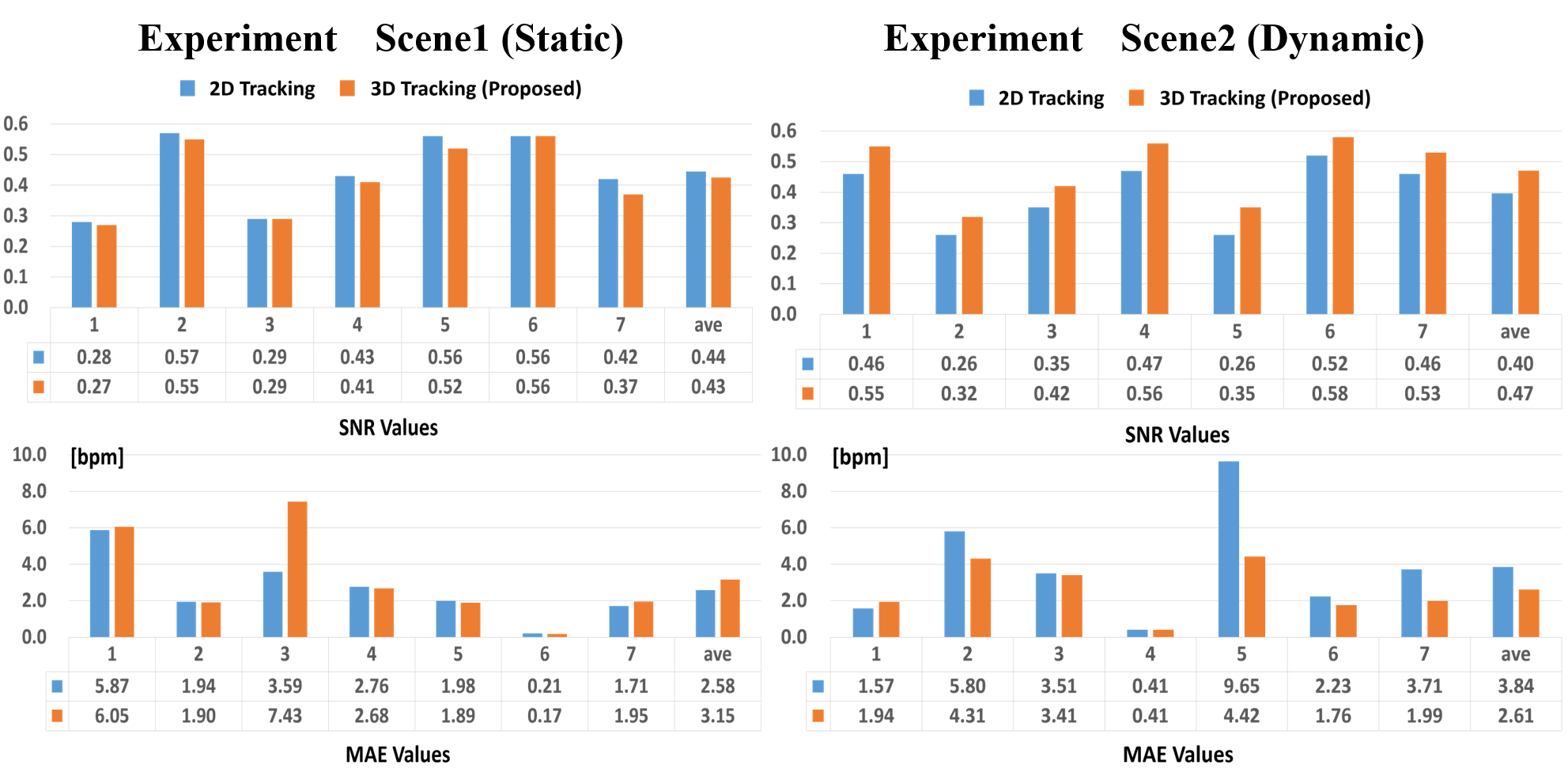 提案手法(3次元追跡)と2次元追跡手法の比較.(左)静的な被験者での結果 (右)動的な被験者での結果
提案手法(3次元追跡)と2次元追跡手法の比較.(左)静的な被験者での結果 (右)動的な被験者での結果
Publications
|