| 広域空間の取得・モデリング・認識・描画
|

|
MOTSLAM: 単眼奥行き推定を用いたMOT支援型単眼式ダイナミックSLAM [2022]
|
|
本研究では、車載した単眼カメラから、動物体(車両)の姿勢とバウンディングボックスの両方を追跡するダイナミックなVSLAMを提案する。
|
|
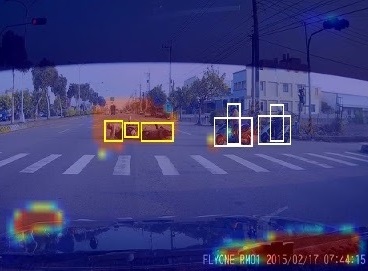
Attentionによるドライブレコーダー映像における事故の弱教師有り推定 [2021]
|
|
本研究では、ドライブレコーダーに撮影された映像から深層学習のアテンション機構を用いて事故を推定する手法を提案する。前処理のため、自動アノテーションによる車両の深層学習トラッキング手法を同時に開発した。
|

|
ドライブレコーダーの映像データから推測した天気情報を用いた急ブレーキ発生状況の分析 [2020]
|
|
急ブレーキ発生状況を分析するために、深層学習を使用してドライブレコーダーの映像から推定した天気を使用して、急ブレーキデータの識別を行っています。
|

|
深層学習(GAN)を用いたドライブレコーダー映像からの冠水検出 [2018--2019]
|
|
ドライブレコーダー映像から冠水という非日常的な事象を検出するために、深層学習(GAN)を利用してデータ拡張を行います。
|

|
都市画像の学習による地域推定手法の提案 [2014]
|
|
インターネット上には多くの車載映像がある。提案手法では、車載映像を学習することで、それらの車載映像の撮影地域を推定する手法を提案する。映像を用いることで、単画像を用いる従来手法よりも精度の向上が期待される。実験では、10都市を対象として、提案手法の有効性を確認した。
|

|
自車位置推定のための複数車載カメラ映像の効率的な時空間マッチング手法 [2012--2014]
|
|
GPSなどのデータのない車載映像から、高精度な自車位置を推定するニーズがある。提案手法では、車載データとデジタル地図との間でマッチングを取ることでこれを実現する。マッチングデータとして時空間特徴量を用いることで、精度と安定性の向上を実現する。
|

|
広域空間の写実的レンダリング [2012--2013]
|
|
車載カメラで撮影した映像から都市の概形をビルボードで表現し、IBRを適用することで写実的な広域空間のレンダリングを行っています。また、テクスチャにPCAによる圧縮手法を適用し、GPU上で高速に復元することで、リアルタイムでのレンダリングを実現します。
|

|
複数の車載カメラ映像の統合による広域形状復元 [2008--2009]
|
|
複数の車載カメラ画像を統合することで更新頻度が高く、精度の高い3次元都市空間のモデリングを行います。
|

|
広域空間のリアルタイムレンダリング [2007--2008]
|
|
IBR(Image Based Rendering)に基づき、全方位画像列を固有空間法で圧縮することで
広域空間のリアルタイムレンダリングを行います。
圧縮の復元演算をfragment-shaderで処理することで高速に復元できます。
|

|
時空間画像解析 [2000--2007]
|
|
取得した画像列(映像)を時間軸方向に積層することで時空間画像を生成し、解析を行う研究も行っています。
例えば、上記のパノラマ画像生成では、時空間画像の解析を利用して複数台のカメラの外部校正を行います。
|

|
広域空間の取得・モデリング [2000--2009]
|
|
車の上にビデオカメラを設置し、現実世界の様々な方向の画像を取得します。
取得した多方向の画像を統合し、パノラマ画像を生成します。
|

|
広域空間のイメージメース・レンダリング手法 [2000--2005]
|
|
生成されたパノラマ画像を再構築することで広域空間のレンダリングを行います。
また、IBRのテクスチャを圧縮し、MBRのテクスチャに用いる研究も行っています。
|