| 複数の車載カメラ映像の統合による広域形状復元 |
|
Structure from Motionの手法の1つである因子分解法を全方位画像列用に拡張したものを用
いて個別に復元した複数の3 次元構造とカメラパスを1つの座標系へ統合し,改めてバン
ドル調整を適用することで密度や正確さが向上したスケーラビリティをもつ広域な仮想都市
モデルを構築する事が出来る.(図1) 同系列画像の自動的グルーピングでは、各動画像にRANSACによる外れ点の除外をしたか ら運動推定を行い、時空間特徴(EPI・THI)を用いたDPマッチングを行う。(図2) 立体平面を構築し,テクスチャマッピングを施した空間を地上の視点から見た結果を図3に 示す。空中に存在している点群は特徴点であり,追跡を行った元画像から色を取得してい る.地面付近の赤い線(点群)は同時に推定された車両(カメラ)運動の軌跡である.(図3)  図1:因子分解法の概念図
図1:因子分解法の概念図
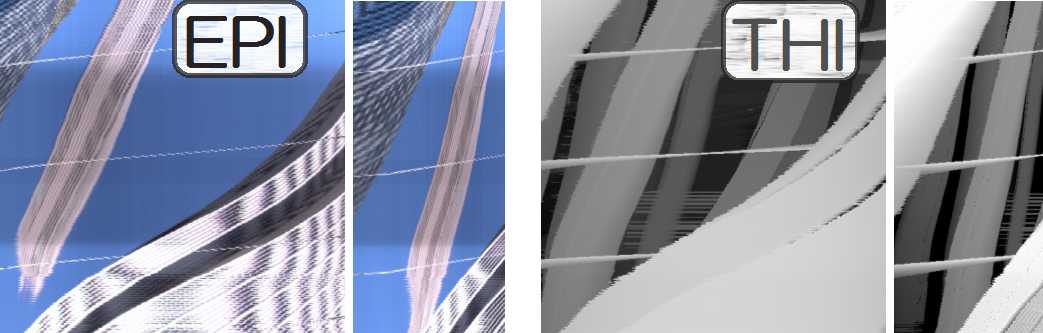 図2:EPI・THI
図2:EPI・THI
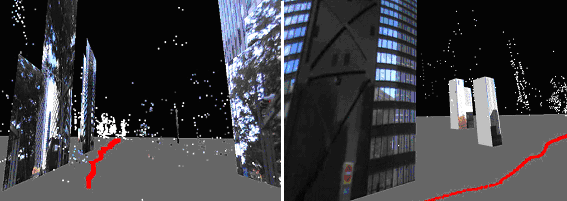 図3: 都市構築結果・地上からの視点(西新宿)
図3: 都市構築結果・地上からの視点(西新宿)
Publications
[1] Ryota Matsuhisa , Shintaro Ono,Hiroshi Kawasaki,Atsuhiko Banno,Katsushi Ikeuchi
"Structure from Motion for omnidirectional images using efficient factorization method based on virtual camera rotation"
International Workshop Computer Vision and Its Application to Image Media Processing, (CD-ROM), pp.1-7, 1.2009[2] 松久 亮太 , 川崎 洋, 小野 晋太郎, 阪野 貴彦, 池内克史 "複数系列の車載全方位カメラ画像の対応付けによる広域都市モデル構築" 第12回 画像の認識・理解シンポジウム論文集(MIRU2009論文集), pp.1570-1577, 7.2008 (ベスト・インタラクティブ・セッション賞) |
| Kawasaki Laboratory |