|
内視鏡は,消化器の疾患の検査,治療に広く利用されている.
軟性内視鏡での診療において,腫瘍の大きさの計測は,治療の方針を決定するために重要である.
そのような計測の多くは,
勘や経験に基づいての目視による推定
などで行われている.
しかし,そのような方法では,人的要因による推定誤差の問題がある.
内視鏡機器を利用して,観察対象のサイズの客観的な計測ができれば,
このような問題の解決につながることが期待される.
我々は,アクティブステレオ法による3次元内視鏡システムを開発してきた.
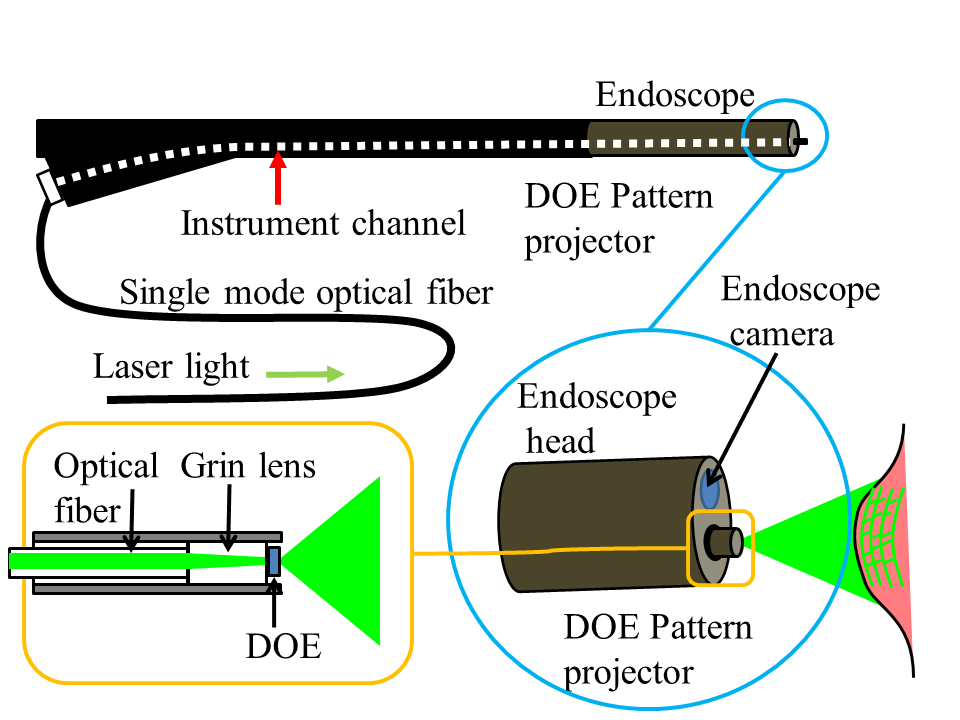
現在の3次元内視鏡システムの構成を下図に示す.
本システムでは,超小型パターン投光器を内視鏡の鉗子孔に挿入し,対象と
なる生体組織にパターン光を投影しながら画像を撮影する.
対象に投影されたパターンは,内視鏡のカメラで撮影され,画像処理によって,撮影画像と,投影され
たパターンとの対応関係が抽出される.その対応を利用して,3 角測量による3 次元計測が行われる.
 3D endoscope system.
3D endoscope system.
本システムのように,パターン投光器を内視鏡に挿入する場合,
投光器は内視鏡に固定されていないので,
内視鏡カメラとパターン投光器の位置関係をあらかじめ推定する必要がある.
我々は,球体を利用した校正手法(EMBC 2014)と,
校正用パターンなどを別途撮影することなく
パターン投光器の校正を行う手法を開発した(EMBC 2015).
3次元内視鏡システムにおいては,
計測対象は生体組織である.
生体組織にパターン投影を行って画像を撮影する場合,
生体組織の表面下散乱により,
投影パターンがボケて不鮮明になる.
また,内視鏡撮影環境では通常のカメラよりもノイズや外乱の影響が大きい.
そのため,通常のアクティブステレオよりもボケやノイズに強いパターン投影が
必要である.
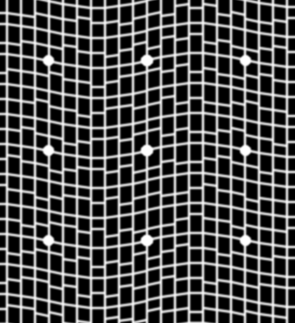
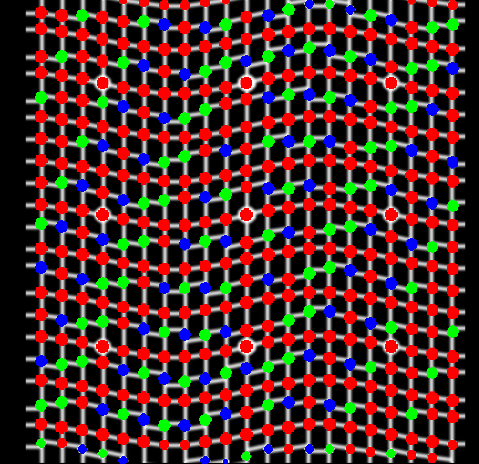
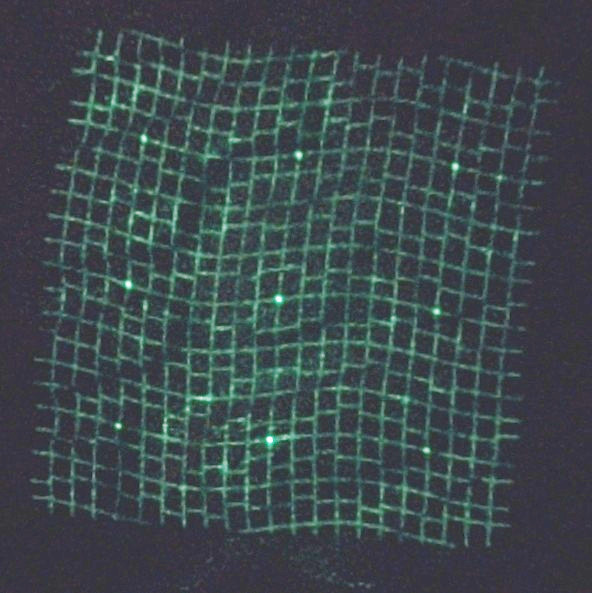
我々は,そのために,
格子状構造の格子点に
段差によるコードを付加した新しいパターンを開発した.
さらに,このようなパターンを,
DOEと呼ばれる光学素子を利用して,
鮮明に投影することが可能なパターン投光器を開発した(EMBC 2016, ECCV 2016, PSIVT 2017).
 Gap coding pattern.
Gap coding pattern.
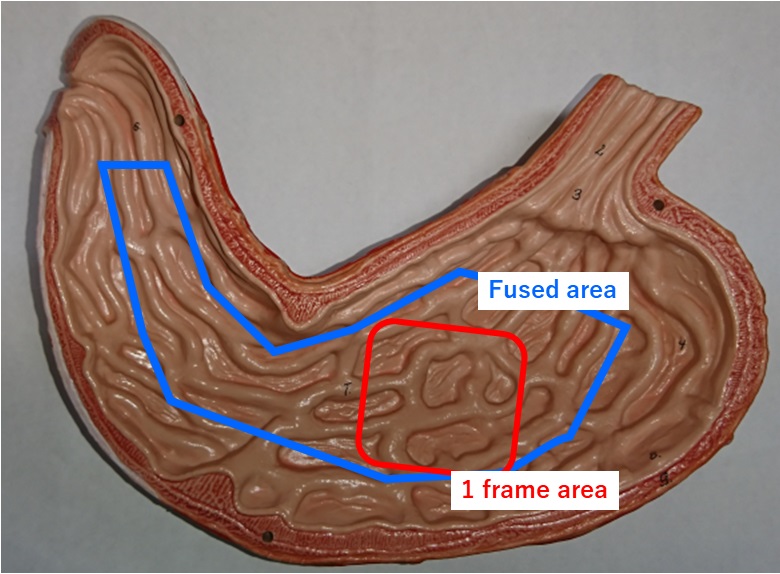
開発中のシステムを利用して,胃のファントム模型を
連続撮影し,結果を統合した例を下図に示す.下図左が
模型の外観と,連続撮影した領域(青線),
1フレームで復元される領域(赤線)である.
下図中が撮影された画像,右が統合された形状である.ファントム模型の
ひだ状の凹凸が再現されていることがわかる
(CARE 2018).
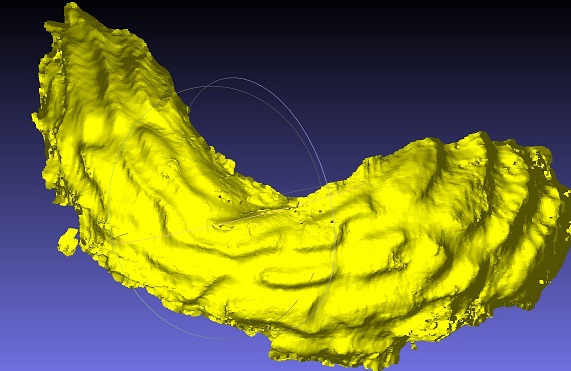 Captured and fused result.
Captured and fused result.
Publications
- Furukawa, R., Aoyama, M., Hiura, S., Aoki, H., Kominami, Y., Sanomura, Y., Yoshida, S., Tanaka, S., Sagawa, R., and Kawasaki, H.,
Calibration of a 3d endoscopic system based on active stereo method for shape measurement of biological tissues and specimen,
Engineering in Medicine and Biology Conference (EMBC 2014), pp.4991–4994, 2014
- Furukawa, R., Masutani, R., Miyazaki, D., Baba, M., Hiura, S., Visentini-Scarzanella, M., Morinaga, H., Kawasaki, H., and Sagawa, R.,
2-dof auto-calibration for a 3d endoscope system based on active stereo,
Engineering in Medicine and Biology Conference (EMBC 2015), pp.7937–7941, 2015.
- Furukawa, R., Sanomura, Y., Tanaka, S., Yoshida, S., Sagawa, R., Visentini-Scarzanella, M., and Kawasaki, H.,
3d endoscope system using doe projector,
Engineering in Medicine and Biology Conference (EMBC 2016), pp.2091–2094, 2016.
- Furukawa, R., Morinaga, H., Sanomura, Y., Tanaka, S., Yoshida, S., and Kawasaki, H.,
Shape acquisition and registration for 3d endoscope based on grid pattern projection,
European Conference on Computer Vision (ECCV 2016), pp.399–415, 2016.
- Furukawa, R., Naito, M., Miyazaki, D., Baba, M., Hiura, S., Sanomura, Y., Tanaka, S., and Kawasaki, H.,
Auto-calibration Method for Active 3D Endoscope System Using Silhouette of Pattern Projector,
Image and Video Technology - 8th Pacific-Rim Symposiu (PSIVT 2017), pp.222–236, 2017.
- 古川 亮, 内藤 雅仁, 溝森 将輝, 宮崎 大輔, 馬場 雅志, 日浦 慎作, 佐野村 洋次, 田中 信治, 川崎 洋,
アクティブステレオ法による3次元内視鏡のためのHDR画像生成と投光器位置の自己校正,
電子情報通信学会論文誌, Vol.J101-D, No.8, pp.1150–1164, 2018.
- Furukawa, R., Mizomori, M., Hiura, S., Oka, S., Tanaka, S., and Kawasaki, H.,
Wide-Area Shape Reconstruction by 3D Endoscopic System Based on CNN Decoding, Shape Registration and Fusion,
Computer Assisted Robotic Endoscopy, Clinical Image-Based Procedures, and Skin Image Analysis, pp.139–150, 2018.
|