|
ライン計測による3次元復元結果は、スパースなラインどうしが引きつけ合うため、通常のICPによる位置合わせが困難である。これを解消する手法を提案する。
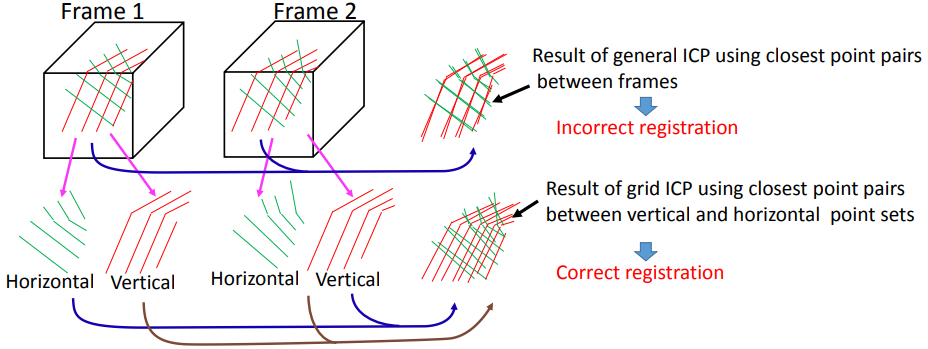
以下に基本原理を示す。
提案手法では、ターゲットする3次元計測手法は、グリッドベースの復元手法となっている。そこで、位置合わせのコスト計算に使用する際に、形状同士の距離として、グリッドを構成する縦と横という異なる方向同士でのみ計算を行う。これにより、誤った方向に引きつけ合うことが無くなる。
以下にシミュレーションおよび、実データによる結果を示す。
通常のICPの場合、同じ方向のライン同士が引きつけ合うため、位置合わせ結果を見ると、縦や横の形状が残っているのに対して、提案手法であるGrid-ICPの場合、まんべんなく位置合わせされていることが観測される。
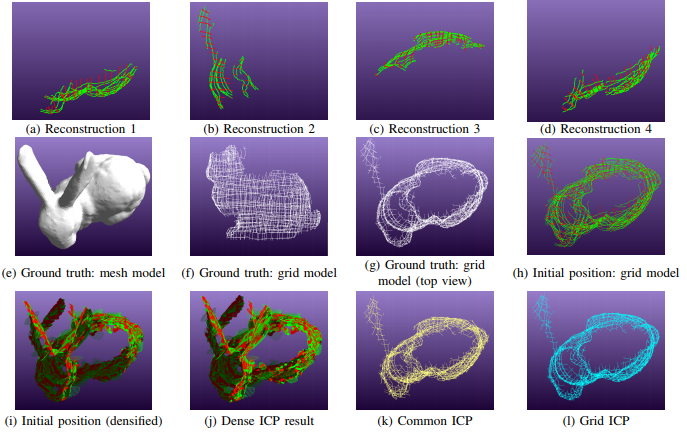 Simulation results using Stanford bunny data.
Simulation results using Stanford bunny data.
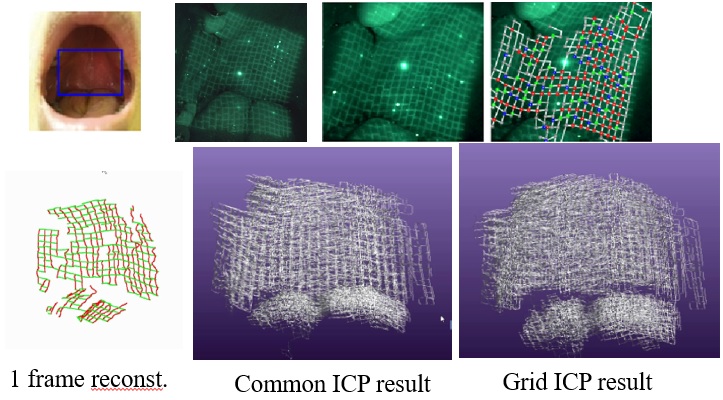
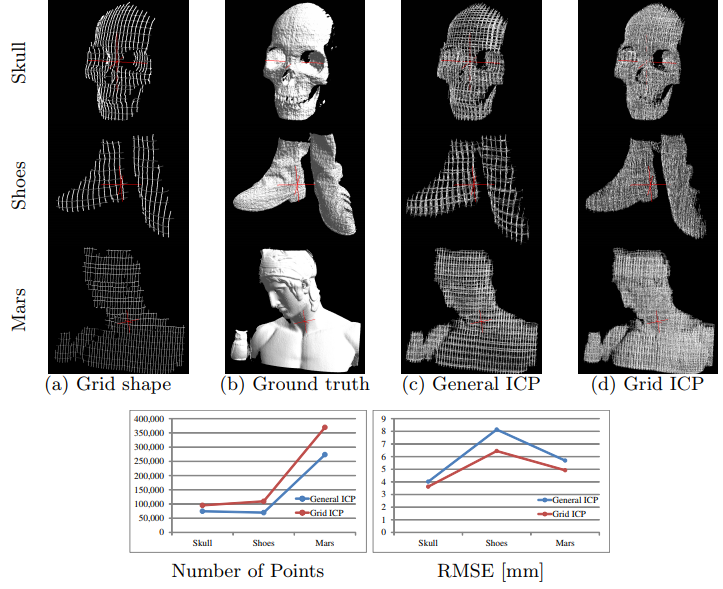 Results of real objects scanned by grid-structured light technique.
Results of real objects scanned by grid-structured light technique.
さらに提案手法を、内視鏡計測結果に適用した結果を以下に示す。提案するGrid ICP手法により、より滑らかな形状復元できていることが確認できる。
Publications
- Ryo Furukawa, Hiroki Morinaga, Yoji Sanomura, Shinji Tanaka, Shigeto Yoshida and Hiroshi Kawasaki
"Shape acquisition and registration for 3D endoscope based on grid pattern projection"
European Conference on Computer Vision ECCV16, 17 pages, 10.2016
- Hiroshi Kawasaki, Takuto Hirukawa, Ryo Furukawa
"Registration and entire shape acquisition for grid based active one-shot scanning techniques"
International Conference on Pattern Recognition ICPR2016, 6 pages, 2016
|